Automatischer Starter
Einleitung
Hier wird mein Variante einer elektrischen Auslösung von Wasserrakete mit Gardenakupplung gezeigt. Es stellt sich erst einmal die Frage für was ein automatischer Starter gut ist. Es gibt einiges das dafür spricht: So gab es bei den vorherigen Starts immer das Problem, dass durch das Ziehen am Außlöser die Rampe verrutschte und der Rakete noch einen "Schubs" zur Seite gab. Natürlich ließe sich das auch anders lösen. Doch wesentlich entscheidender ist die Tatsache das mit Hilfe eines automatischen Startsystems viele neuen Ideen umgesetzt werden können. So kann die Rakete aus weiter Entfernung gestartet werden. Mit Hilfe von weiterer Elektronik kann ein Count-Down gezählt werden, welcher auf für die Syncronisation mehrer Kameras verwendet werden kann. Und zu guter Letzt könnten weiter Sicherugnen eingebaut werden, welche verhindern, dass z.B. bei zu niedrigem Druck oder einem Fehler in der Bergungselektronik gestartet wird. Die bedeutet natürlich die Entwicklung weiterer Komponenten :). Doch nun soll erst einmal auf das automatische Startsystem eingegangen werden.
Materialien
- Vieel Aluminium Halbzeug
- Kupferblech
- Kupferrohr 12mm
- Kupferrohr 15mm
- M4x25 Schrauben
- Federn
- M8 Gewindesangen
- Gummigerätefüße
- M8 Muttern
- ...
Werkzeug
- Metallsäge
- Metallfeilen
- HSS-Bohrer
- Gewindeschneider
- Akkuschrauber
- Tischbohrmaschine
- MeĂźschieber
- AnreiĂźnadel
- Körner
- Hammer
- ImpusschlĂĽssel
- Gaslöter
- Lötzinn
- ...
- Viel SchweiĂź und Geduld :D
Funktionsweise
Nach eingen Ăśberlegungen und dem Vergleichen mit bestehen automatischen Startsystemen (pneumatischen, elektronischen) habe ich mich entschieden auf eine mechatronische Variante zu setzten.
Bei diesem System wird nun eine Feder mit Hilfe eines Stößels gespannt(von Hand). An diesem Stößel sind die Bowdenzüge der Startrampe befestigt. Durch einen Servomotor wird der Stößel freigeben die Feder entspannt sich und zieht somit an den Bowdenzügen. Durch Stellschrauben kann sowohl der Weg des Stößels als auch die Vorspannung der Federn eingestellt werden.
Baubericht
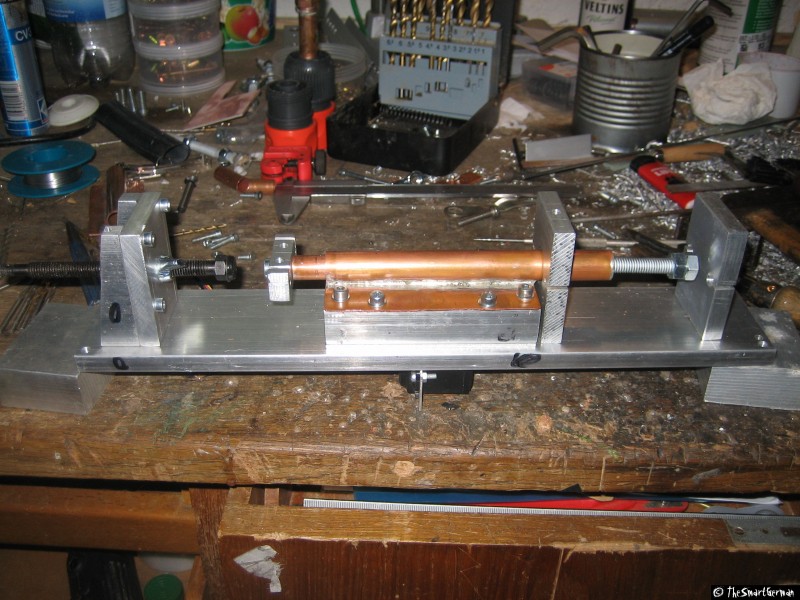
Grundaufbau
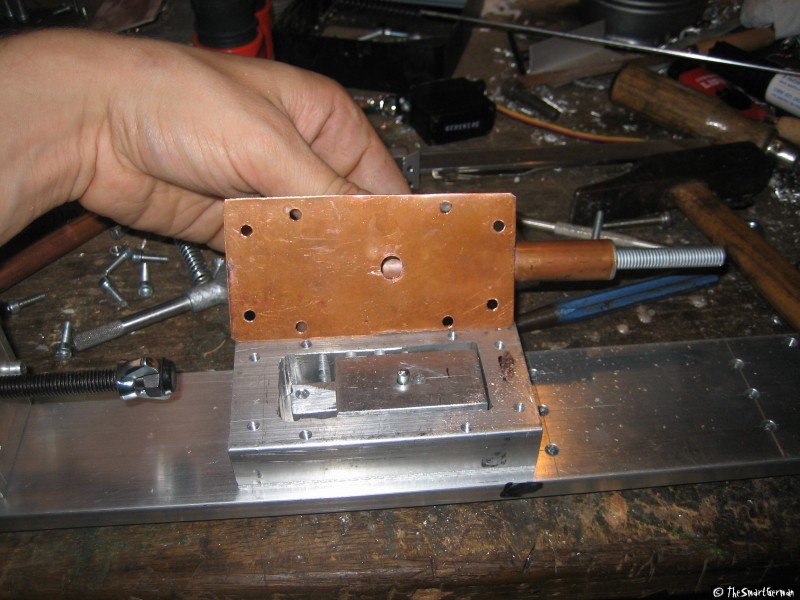
Der Aufbau erfolget auf einer massiver Alugrundplatte. Alle Komponenten sind an dieser befestig. So auch der Rahmen in dem der Auslösestift mitsamt der nötigen Komponenten verbaut wurde. Der Rahmen wurde aus einem massiven Aluklotz gefertigt. Die Kontur der Aussparung wurde mit vielen Löchern abgebohrt, das restliche Materiel mit einer Feile abgetragen.


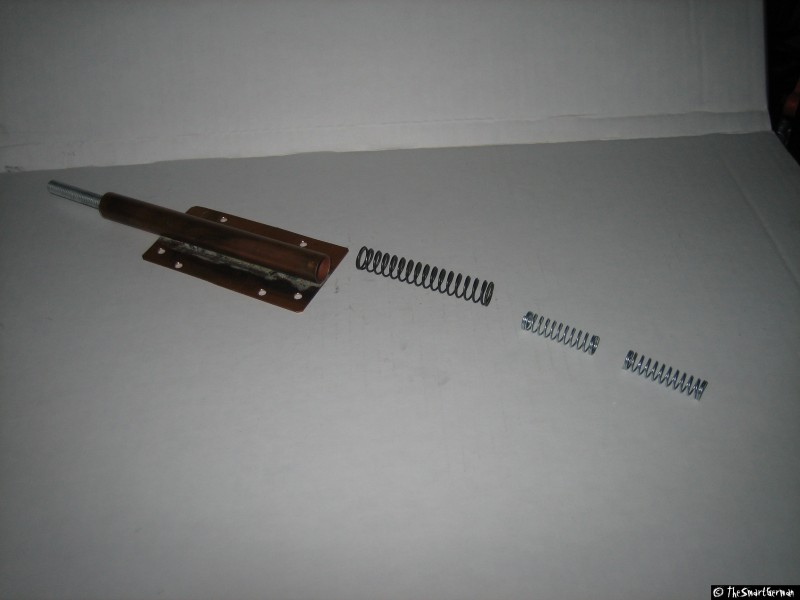
Stößel und Führung
Als erstes wurde ein 15mm Kupferrohr auf ein Kupferblech gelötet. An der Rückseite des Kupferrohrs wurde eine M8-Mutter befestigt, welche auf den Durchmesser des Rohr geschliffen wurde und dann verlötet. In diesem Kupferohr befindet sich eine starke Feder und eine Schieber. Der Schieber besteht aus einer M8 Schraube deren Kopf ebenfalls geschliffen wurde, um in das Rohr zu passen. Mit Hilfe des Schiebers kann die Vorspannung der Feder eingestellt werden. In das 15mm Kupferohr wird nun ein 12mm Kupferrohr geschoben welches nun auf die Feder wirkt. Dies stellt den eigentlichen Stößel dar, der die Bowdnezüge bedient. In das 12mm Rohr wurde einbenfalls eine Mutter eingelötet, an diese ist eine Aufnahme für die Birnennippel des Bowdenzuge geschraubt.
Durch die beiden Rohre wurde ein Loch gebohrt um diese im gespannten Zustand durch einen Bolzen halten zu können.







Auslöser
Nun der Aufbau des eigentlichen Auslösers ist recht tricky: Der Bolzen wird mit Hilfe einer Feder permanent nach oben gedrückt. Dadurch Rastet der Bolzen von selbst ein, sobald der Stößel gespannt wird: Nun ist der Auslöser scharf. Mit Hilfe eines Servos kann nun der Bolzen nach unten gezogen werden und löst den Start aus. Nun muss der Stößel wieder von Hand gespannt werden.
Der Aufbau ist schwer in Worte zu fassen, hier der Versuch: Als Bolzen dient eine abgesägte M4 Schraube, welche in einem "Käfig" durch 2 Bohrungen geführt wird. Dazwischen befindet sich eine M4-Mutter und eine Feder. Die Feder drückt den Bolzen immer nach oben. Durch die Mutter kann der Bolzen in der Höhe verstellt werden. Mit Hilfe eines Hebels kann nun der Bolzen nach unten gezogen werden. An diesen Hebel wird später der Servomotor durch ein Gestänge befestigt.

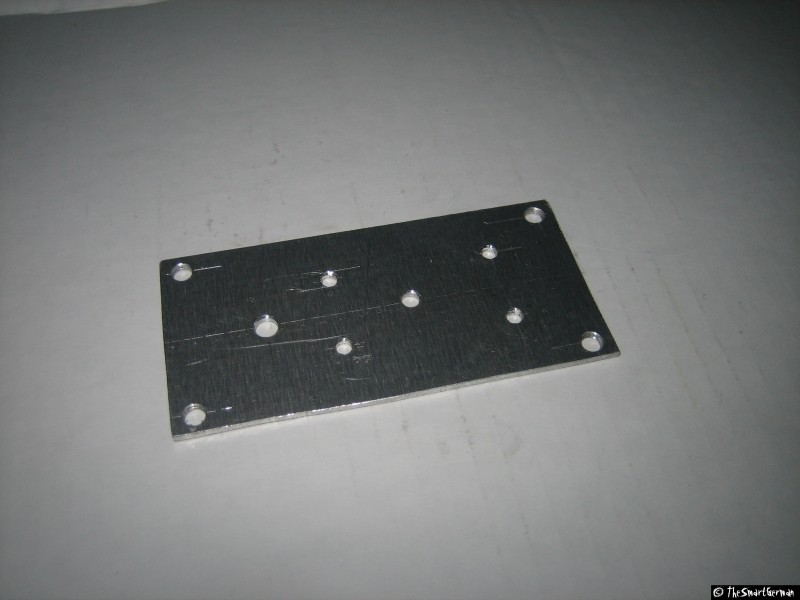





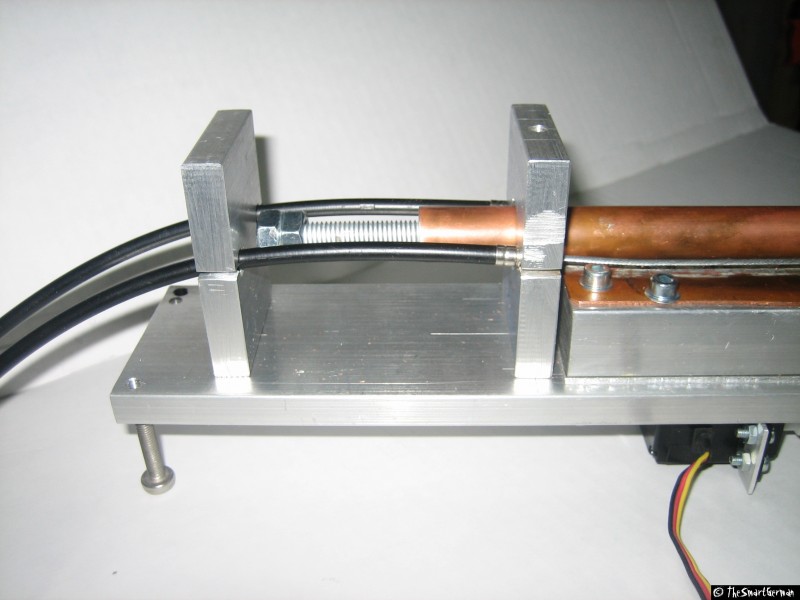
BowdenzĂĽgehalter
Auf der Vorderseite befinden sich zwei Halteplatten. In der ersten befinden sich lediglich 3 Bohrungen, die äußeren Bohrungen dienen als Durchführung für die Bowdenzüge und verhindern ein abknicken. In der zweiten Platte befindet sich die Bohrungen in welche die Bowdenzüge angehängt werden. Diese Platte dient als Gegenhalter und fixiert die Bowdenzüge.



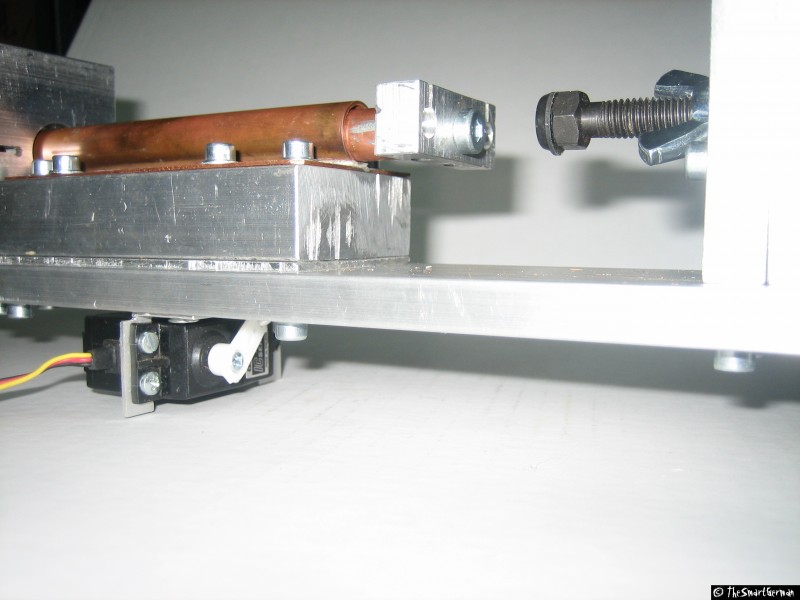
Stößelbegrenzer
Auf der Rückseite befindet sich die Begrenzung für den Stößel, bestehend aus einer M8 Schraube auf welche ein Gummifuß geklebt wurde, um den Stoß anzufangen. Mit Hilfe der Schraube kann der Weg, um den die Bowdenzüge gezogen werden sollen, eingestellt werden. Somit kann der Auslösebpunkt jeder Kupplung exakt eingestellt werden.



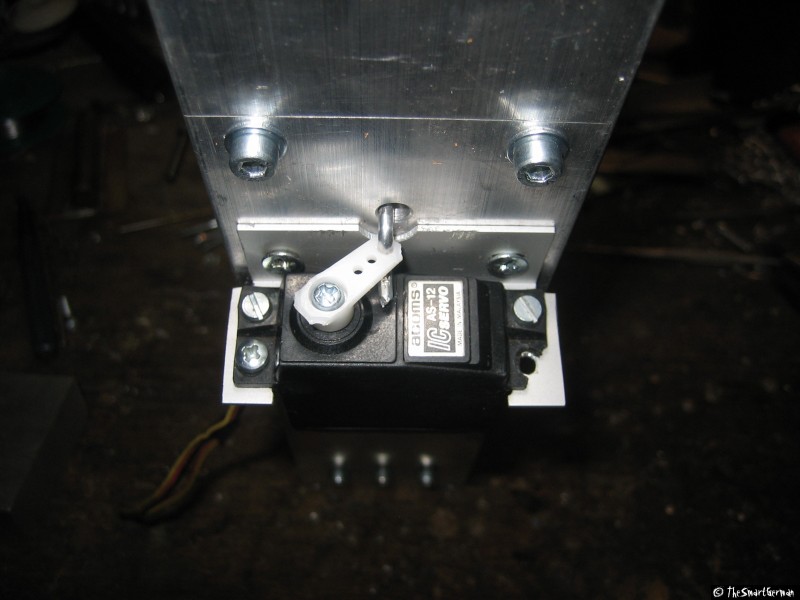
Servo
Der Servo wird von einem Aluminium Winkel gehalten. Über das ein Gestänge ist der Servo mit dem Hebelarm des Auslösers verbunden. Nach dem Auslösen muss der Servo auf die Ausgangsposition (oben) zurückfahren. Nun kann jederzeit der Starter wieder gespannt werden. Das einrasten des Stößels erfolgt von selbst.

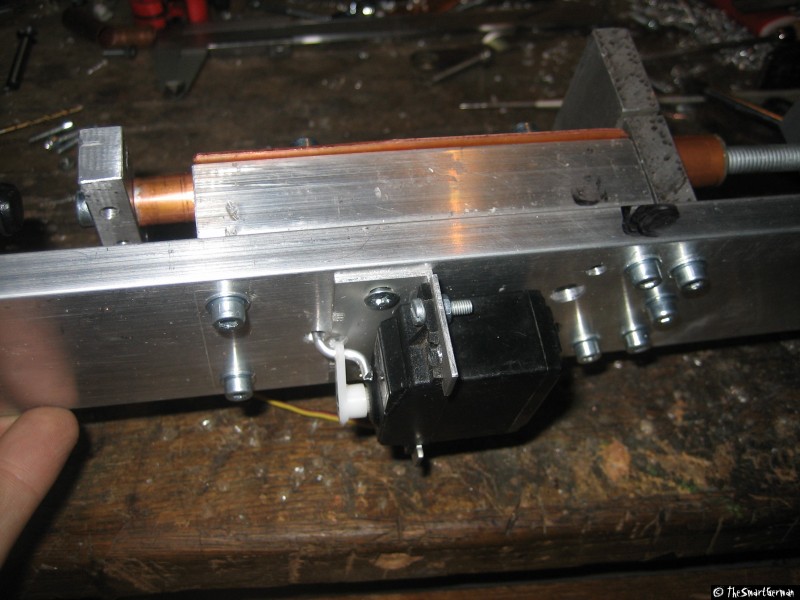
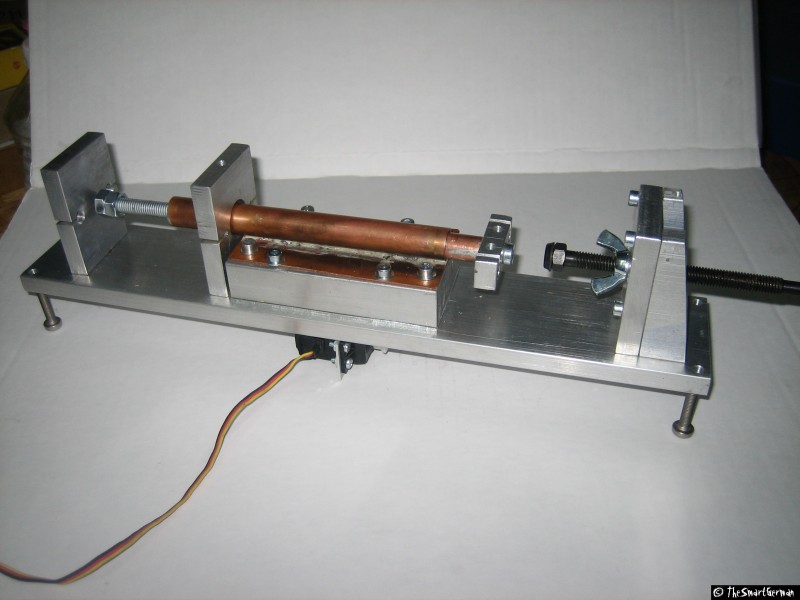
Der komplette Starter
Nach massivem Material und Schweißaufwand ist hier ein sehr robuster Starter entstanden. Die Anbringung des Servos ist noch ein wenig ungeschickt gelöst. Ein Gehäuse um den Servo zum Schutz vor Wasser wäre auch nicht schlecht. Doch im großen und ganze kann man mit dem Ergebnis sehr zufrieden sein. Die ersten Tests mit Drücken von bis zu 16 Bar waren erfolgreich ebenso wie die ersten Starts.